一、产品背景及意义

1.1 背景
江河、湖泊、水库、是地表水环境保护的重要内容之一,水质水文数据是反映各水域的基本特征,有关部门可以根据相关的数据做出相应安排,能够准确性采取环境保护措施有效预防突发事件的发生。在江河、湖泊等地表水体的水文流量监测中,地表水体离岸监测点位取样一直是困扰环境监测部门的难题。
传统的环境水质水文监测是通过人工携带便携式仪器亲临现场经行监测或者式固定站点的连续监测,费时费力,自动化程度低,难以对水环境做出整体有效的评价与分析。通过使用物联网将几种监测手段结合起来,充分利用无人船的便捷性,搭载不同的传感器设备,射频技术,无线通讯技术等,快速有效的获取大范围的水文水质等信息,传送到后台并对这些信息经行数据的整合和挖掘,做出整体有效的评价分析。
水文水质信息的快速获取及数据的高效利用是水环境监测中物联网技术运用的关键.
1.2 意义
无人监测船在线监测系统可实施水质自动监测,实现水文流量、水深测绘等的实时连续监测和远程监控,达到及时掌握主要流域重点断面水体的水流流速状况、预警预报重大或流域性污水排放事故,监督总量控制制度落实情况、排放达标情况等目的。
1.2.1)解决现有江河湖库作业监测装备实际痛点(人工乘船采样、效率低下、危险、作业时长有限等),为我省水环境监测工作顺利开展提供高效、安全、可靠技术手段,显著提高水环境监测的技术能力与技术水平。
1.2.2)直接提升现有江河湖库水文流量与监测装备行业的技术水平,实现从有人采样与监测装备到无人监测装备的替代与行业进步。
1.2.3)应用现有无人监测船在线监测系统平台中的自主航行、路径规划等技术,真正做到全天候、高精度、自动化、高效益的工作模式,大幅度提高采样监测水文测绘的作业效率。
二. 无人船产品整体架构和特点
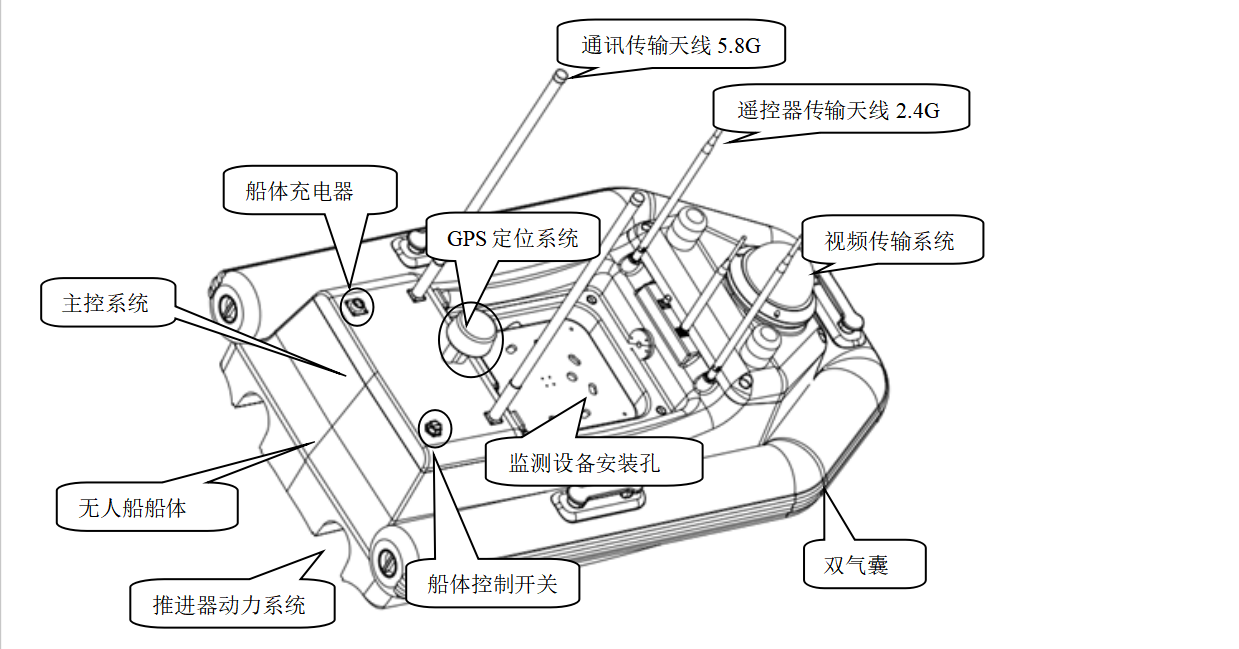
无人监测船在线监测系统由水面机器人船体、主控系统(含主控模块及主控嵌入式软件)、供电系统、船载遥控器通信系统及水文监测设备部分构成。从而建成一个局域网络,实现远程操控船体,并进行无线数据传输的一体化系统。
系统总体架构图如下:

系统工作条件
最小水深:≤0.15m;
风浪等级:≤3级风,≤2级浪;
投放方式:岸边投放
适于电源220~240V/50Hz
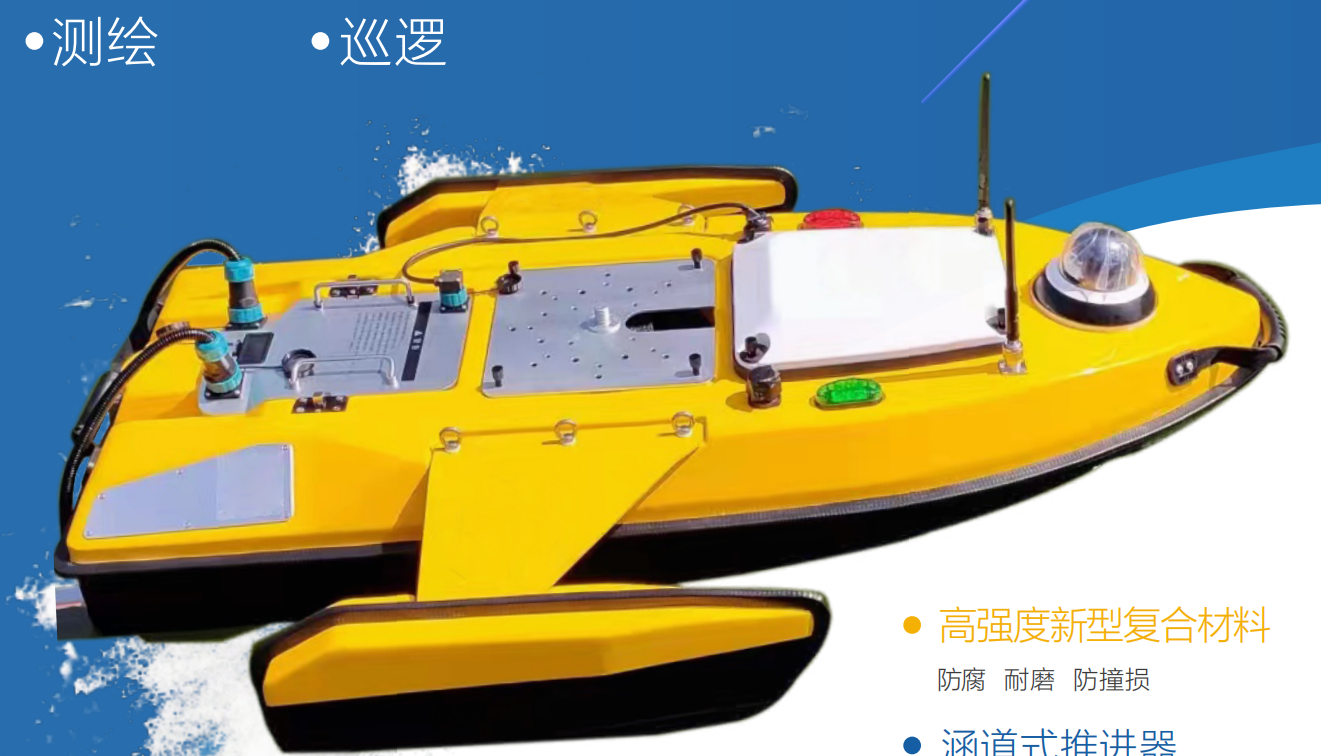
1. 无人流船体
新型高强度复合材料作为船体材质,该材料是由S级无碱玻璃纤维经编复合毡、凯夫拉防弹装甲材料及先进的纳米级碳素纤维等构成。船体小,重量轻,方便携带;具有防撞,防磨损,防腐等特性。
设计形态:M型体流线式设计,重心低、阻力小、航行稳
船体安全防护及防沉设计:双气囊独立隔离设计,耐撞击,稳定性好,船体带有警示装置。全封闭防水和防沉设计。
2.
动力系统

可插拔涵道式推进器
可拆卸涵道式推进器,与船壳底齐平形状一致,放置与行驶可以很好的避免碰伤、撞击、有效的防止水草缠绕,安全可靠性高、安装维护携带方便。
动力装置:2组涵道式推进器,与船底齐平,可浅水投放,具有防水草缠绕设计。安全可靠性高、易于安装维护及便于携带。
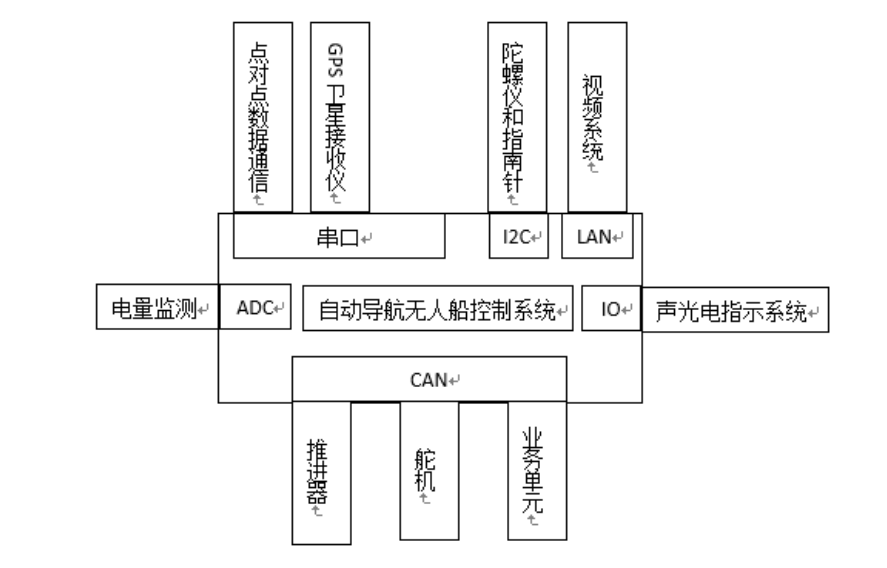
3. 主控系统
船只可以接受遥控器的指令并执行,通过遥控器完成全部的航行任务和工作任务;
船只可在船控控制下根据GPS定位,遥控行驶,完成任务后可手动返航。
方向控制方式:支持无舵机转向功能和“倒车”航行技术。
系统组成如下图:
4. 供电系统
采用高能锂离子聚合物电池;续航能力,2小时;支持备用电池直接更换。船体外部有预留接口可直接进行充电;支持大电流充电器,充电电流可达10A;
技术指标
电池容量:29.4V 20Ah *2组
电池充放电次数:≦200次
大电流充电器:电流10A
5. 通讯系统
船载天线及安装基座、数据无线发送/接收模块、因搭载仪器通信系统所需屏蔽等处理。
无人船与遥控器采用RF无线射频点对点通信方式,进行数据通讯功能
工作频率:2.4G。 开阔地段通讯距离:≦1公里;遥控器天线类型:全向型玻璃钢天线。
无人船与地面基站采用RF无线射频点对点通信方式,进行数据、视频通讯功能。
工作频率:5.8G。 段通信距离:≦2公里(理论空旷无干扰环境中);天线类型:全向型玻璃钢天线。
6. 手持遥控器
遥控器可以控制无人船行驶,与地面基站对无人船控制权交互转换;
遥控器可手动编辑工作任务:随时控制,随时中断或随时改变工作任务;
重量:≦1公斤 ,防水防尘等级:IP65;
摇杆数量:2个 ,摇杆范围:360°
通讯模块:2.4G全向型天线
遥控距离:≦1公里
7. 远程视频监控系统
高清摄像机和视频传输模块,过视频监控,可人工远程操纵无人船,使其姿态调整更平稳有效保证测量精度和准确性,船体航行更安全。

摄像界面:

8. 定位系统
高精度 GPS/北斗定位系统,需要接收机、导航系统软件模块组成。
9. 远程控制系统
与遥控器对无人船控制权交互转换;支持Windows等主流操作系统;搭载视频图传模块,远程操作。
可下载工作水域离线卫星地图,并存储和管理。可设置船只行驶路线、采样监测点顺序、及返航路线等任务编辑。常规采样、监测、测流、测绘等任务存储及调用、历史数据的存储;
接收和显示无人船信息,实时显示水质在线监测结果;图形动态显示无人船工作状态(即移动、监测)、位置状态(或经纬度)、朝向、显示船只剩余电量、行驶速度、等各类信息;
10. 业务单元
(1)船载测扫声呐
StarFish 453 OEM声呐
StarFish 453 OEM由2块换能器和1块电路板组成,用户可使用它OEM到自己的产品中。
使用了StarFish的数字CHIRP声学技术,453 OEM系统水平波束宽度0.5度,耐压3000米,可在100米量程时提供高分辨率的海底图像。
电路板支持9-28VDC电源,可使用USB连接到电脑。另外,提供Scanline软件包,和SDK开发包,用于辅助用户开发自己的声呐系统。
主要特点:
1. 独立式船体安装的换能器;
2. 0.5度的水平波束宽度,提供高分辨率的海底图像;
3. 电子波束脚印小,165mmx 100mm x23mm;
4. USB连接;
5. 耐压300米。
技术参数:
尺寸:
长:432mm
宽:41mm
高:18mm
空气中重量:0.35kg
壳体:
结构:黑色聚乙稀
耐压:300m
电缆长:可定制
电缆结构:黑色聚乙稀外套,内含凯夫拉加强物质
声学:
水平波束宽:60°@ -3dB 信号级别
垂直波束宽:0.5°@ -3dB 信号级别
频率:450kHz中央频率(430-470kHz Chirp)
量程:1m~100m单侧
工作模式:Chirp 脉冲压缩模式
脉冲长度:典型400us
发射能量级别:<210dB re 1µPa @ 1m

StarFish Scanline软件:
Scanline软件是一款用户界面友好的专为StarFish海底侧扫声呐系统使用的采集和记录软件。软件兼容32位或64位Windows操作系统,包括windows 2000, xp, vista, win7,win8,win10,软件实时显示和记录侧扫声呐的数据,同时它也可记录其它辅助传感器的数据,如GPS,罗盘,速度计等,所有采集的数据都可以记录并导出。
用户通过软件可控制左舷、右舷或两侧的通道同时工作。海底的图像可以放大,改变目标物的比例更好的识别物体,软件同时也支持多种显示方式,如从顶到底,从左到右,或反之亦然。在使用时,用户也可以随时调节工作的增益、对比度和量程。
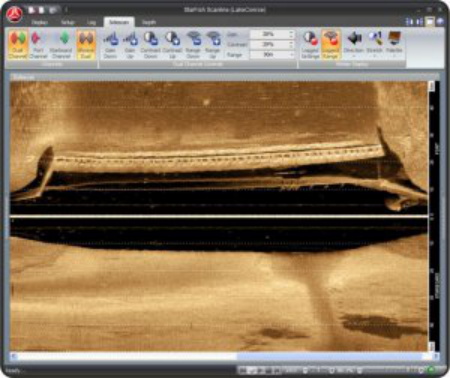
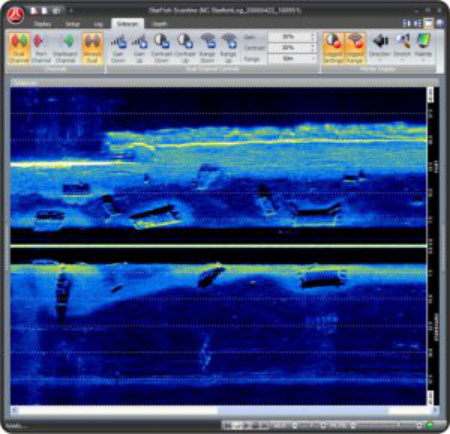

Scanline软件显示的部分窗口。
(2)水质监测(水质多参数分析仪)
EXO2s多参数水质监测仪
为长期连续监测设计的EXO2s,是一款多参数水质监测仪,可以监测常规五参数,根据应用需求还可测定氨氮、蓝绿藻、叶绿素a等参数。
仪器采用防腐蚀,耐冲击、具有高化学稳定性的Xenoy塑料外壳,采用加强结构设计,具备同时监测水温、溶解氧、电导率、浊度和酸碱度、氨氮,总藻(叶绿素+蓝绿藻+藻蓝蛋白)等7个参数的功能。
主机采样频率高达4Hz。主机电缆半双工RS485通讯,主机和显示器之间支持蓝牙无线通讯;蓝牙通讯技术以用于校准、通讯和下载数据时无电缆操作;配置应包括内置的磁开关和外带的用于无线控制蓝牙的激活物件。
传感器均应该是“智能”的并存贮了其校准数据在其中。传感器应可在不同EXO主机间交换,亦可在同一台主机的不同接口间转移,主机接口自动识别探头改变,且无需要校准即可准确测量;光学传感器工作面采用蓝宝石材料。
除深度传感器外,所有传感器可以湿拔插,可以现场拆卸、更换和维修;所有传感器采用钛合金材质,满足深度达250米的运行环境;所有探头内置温度探头,实现温度补偿。
智能接口可自动识别故障,自动关闭故障探头或接口。
数据存储功能,主机存储器: 512 MB;存储量不得小于100万个测量数据。
ROX溶解氧传感器采用荧光寿命检测技术,是当今最可靠的溶解氧传感器,维护量极低;在高硫化氢(H2S)与低氧环境也能长时间工作,并获得可靠数据,亦不受流速限制。也是能反映湖泊、河道等水体黑臭主要的指标。
蓝绿藻传感器可帮助用户监测其目标水域的叶绿素和蓝绿藻数量,从而知道河道的富营养化程度。YSI 蓝绿藻传感器均能提供高灵敏性、高可靠性的现场数据。
1.技术规格:
1.1. 工作条件:
1.1.1 环境温度:-5℃~+50℃;
1.1.2 相对湿度: 0%~100%
1.2 分析方法、功能、技术参数要求
1.2.1 分析方法要求
多参数水质监测仪的测量方法应与国家标准方法或行业标准方法一致,性能稳定、工作可靠、可控性好。具体如下表所示:
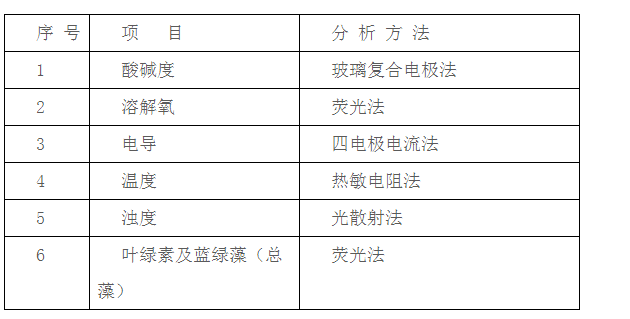
1.2.2 系统基本功能
1.2.2.1 具备同时监测水温、浊度、pH、溶解氧、电导率、叶绿素和蓝绿藻(总藻)等7个参数的功能。
1.2.2.2 所有探头都可以现场拆卸、更换和维修
1.2.2.3 传感器配清洁刷,可以消除附着物和气泡的影响,延长维护周期。
1.3 仪器技术参数
1.3.1 水温
量程:-5-50℃
分辨率:0.001 ℃
准确度:±0.01℃
响应时间: T63<1 sec
1.3.2 pH
量程:0~14
分辨率:0.01
准确度: ±0.1,校准温度±10℃范围内;±0.2 ,全温度量程
探头分为底座和前端,探头前端可更换
1.3.3电导率
量程:0~200mS/cm(自动量程选择)
分辨率:0.001mS/cm~0.1mS/cm(视量程而定)
准确度:读数之±0.5%
自动温度补偿
1.3.4浊度
量程:0-4000 NTU
分辨率:0-999 NTU:0.01 NTU;1000-4000 NTU:0.1 NTU
准确度:0-999 NTU:0.3 NTU或读数之±2%; 1000-4000 NTU:读数之±10%
响应时间: T63<5sec
1.3.5溶解氧
量程:0~50mg/L
分辨率:0.01mg/L
准确度:0 - 20 mg/L:±0.1 mg/L或读数之1%,以较大者为准;20 - 50 mg/L: 读数之±5%
响应时间: T63<5sec
1.3.6 总藻类传感器:单一传感器的双荧光通道可同时测量叶绿素和蓝绿藻藻蓝蛋白;
1.3.6.1总藻类传感器-蓝绿藻藻蓝蛋白
测量方法:荧光法
量程:0- 100 μg/L;0-100 RFU;0-1,100,000 细胞/mL
线性: R2 > 0.999,与罗丹明WT连续稀释相关(0 - 100,000μg/mL )
检出限:300 细胞/mL ;0.1 μg/L PC
分辨率:0.01 μg/L;1 细胞/mL;0.01 RFU
1.3.6.2 总藻类传感器-叶绿素
测量方法:荧光法
量程:0-400 μg/L Chl 0-100 RFU
分辨率:0.01 μg/L Chl;0.01 RFU
线性:R2 > 0.999,与罗丹明WT连续稀释相关(0 - 400μg/mL)
检出限: 0.1 μg/L Chl






 关注微信公众号
关注微信公众号