铭亚(MY-J01)水面救援机器人
使用说明书

安徽铭亚智能科技有限公司
2023
前 言
本手册主要介绍了MY-J01救援机器人产品的功能、操作方法等。本手册只作为用户操作指示,不作为维修服务依据。产品的不断升级与更新,将另作补充说明,恕不另行通知。详情可向各经销商查询。 |
提示本手册使用的画面有可能与实际画面有所不同。本手册画面中显示的内容有可能与实际内容有所不同。 |
警告请务必仔细阅读并充分理解使用说明书的全部内容,同时常备身边,作为使用时必要的参考。未经我司允许的情况下,请勿拆解您的救援机器人。私自拆解救援机器人可能导致危险。严禁其他人员使用本救援机器人,除非他们已经完全阅读并理解了本使用说明书。务必注意本手册中所有的注意事项,操作时应严格遵守本使用说明书。无论何时都不应将身体的任意部分接触到螺旋桨,特别是螺旋桨高速旋转时。严禁本救援机器人被用于违法犯罪活动。 |
目 录
免责声明
使用本产品之前,请仔细阅读本声明。一旦使用本产品,即视为对本声明全部内容的认可和接受。本产品不适合未满18周岁的未成年人使用。在使用过程中,操作者承诺对自己的行为及因此而产生的所有后果负责。使用者承诺仅出于正当目的使用本产品,并且同意遵守此条款及安徽铭亚智能科技有限公司可能指定的任何相关政策或准则。
本产品是一款优秀的水面救援机器人,在供电正常及部件未损坏的情况下,能够提供快速、准确的水面救援。本产品优良的性能得益于安徽铭亚智能科技有限公司的原厂配件。安徽铭亚智能科技有限公司对因不使用原厂配件而造成的任何损失与伤害不承担任何法律责任。
1 产品简介及使用
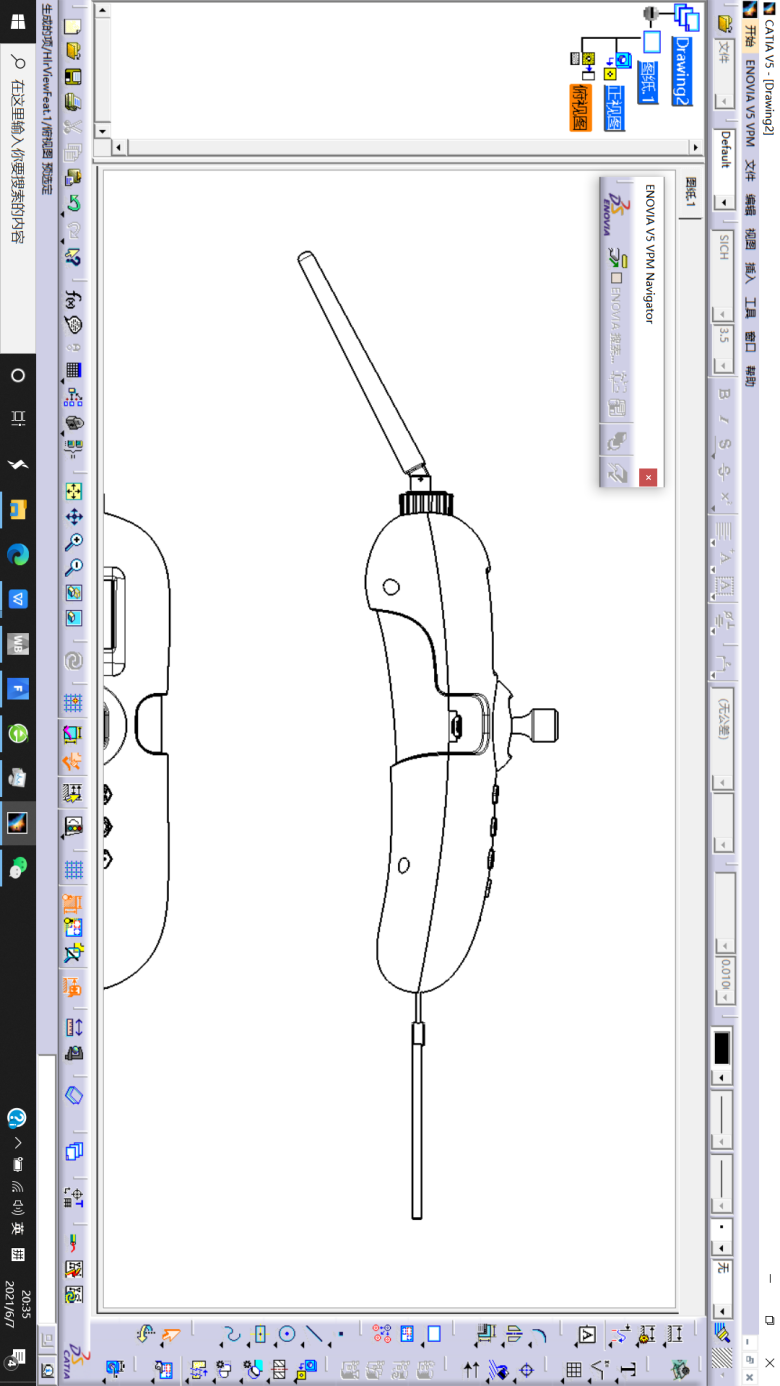 1.1遥控器
1.1遥控器
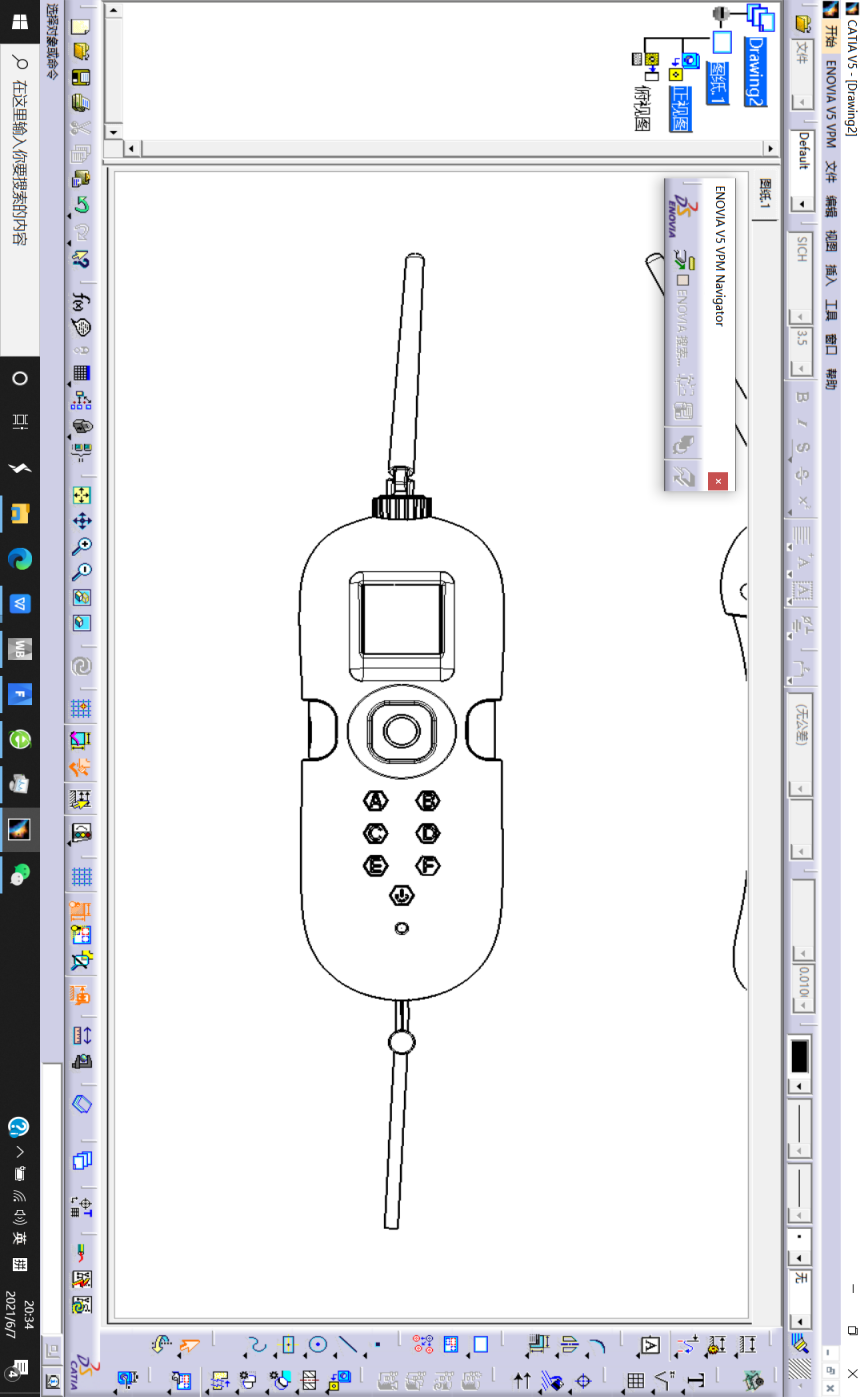
天线
彩屏7.5V手动
摇杆经度:0.00000000纬度:0.00000000电流:0.000电量: 0速度:0.000方向:0.000
充电口按键
开关
前进: 左转:后退: 右转:
防脱绳
图1.1 遥控器及开机画面
手动 | 开机默认为手动操作模式 |
7.4V | 此处显示遥控器电压,低于6.4V时需充电 |
经度:0.00000000 | 遥控器及船体开机等待一段时间后显示当地经度 |
纬度:0.00000000 | 遥控器及船体开机等待一段时间后显示当地纬度 |
电流:0.000 | 此处实时显示行船时的电流数值 |
电量:0 | 此处显示船体电量百分比,低于20%应尽快返航 |
速度:0.000 | 此处实时显示行船时的速度数值 |
方向:0.000 | 此处显示以北为基准船头所对准的方向角度数值 |
前进 | 向前拨动遥控器摇杆可显示数值,幅度为0~100 |
后退 | 向后拨动遥控器摇杆可显示数值,幅度为0~100 |
左转 | 向左拨动遥控器摇杆可显示数值,幅度为0~100 |
右转 | 向右拨动遥控器摇杆可显示数值,幅度为0~100 |
注:此使用说明书所显示的所有画面中的数字仅作为用户操作时的参考,不代表产品真实数据 。
1.1.1 遥控器操作说明
一键返航点设定:单击C键(请在救援机器人下水后设定)。一键返航:单击A键(设定返回点后才可使用),此时开机画面中“手动”将切换为“自动”,且人为拨动摇杆将不能操控救援机器人。一键返航取消设定:单击B键(可随时操作),此时开机画面中“自动”将切换为“手动”。参数设定:单击E键进入“参数设置”页面,此时A和C为上下选择键,B和D为数值增减键,F为存储修改项并退出“参数设置”页。关机状态长按开关键2秒以上开机,开机状态长按开关键2秒以上关机。根据图1.2,列出遥控器按键A、B、C、D、E、F及开关键功能详解:
参数设置中 位 150信 道 6限 速 100船信道 6P 值 0.000I 值 0.000D 值 0.000

图1.3遥控器“参数设置”画面图1.2 遥控器按键及开关
1.1.2“参数设置”释义
中位 | 无需调整 |
信道 | 遥控器信道,务必与“船信道”一致 |
限速 | 调整PWM占空比 |
船信道 | 救援机器人信道,务必与“信道”一致 |
P值 | 默认无需修改 |
I值 | 默认无需修改 |
D值 | 默认无需修改 |
1.2救援机器人
磁开关船体平衡阀推进器拉绳密封舱盖充电口(带防水密封旋盖)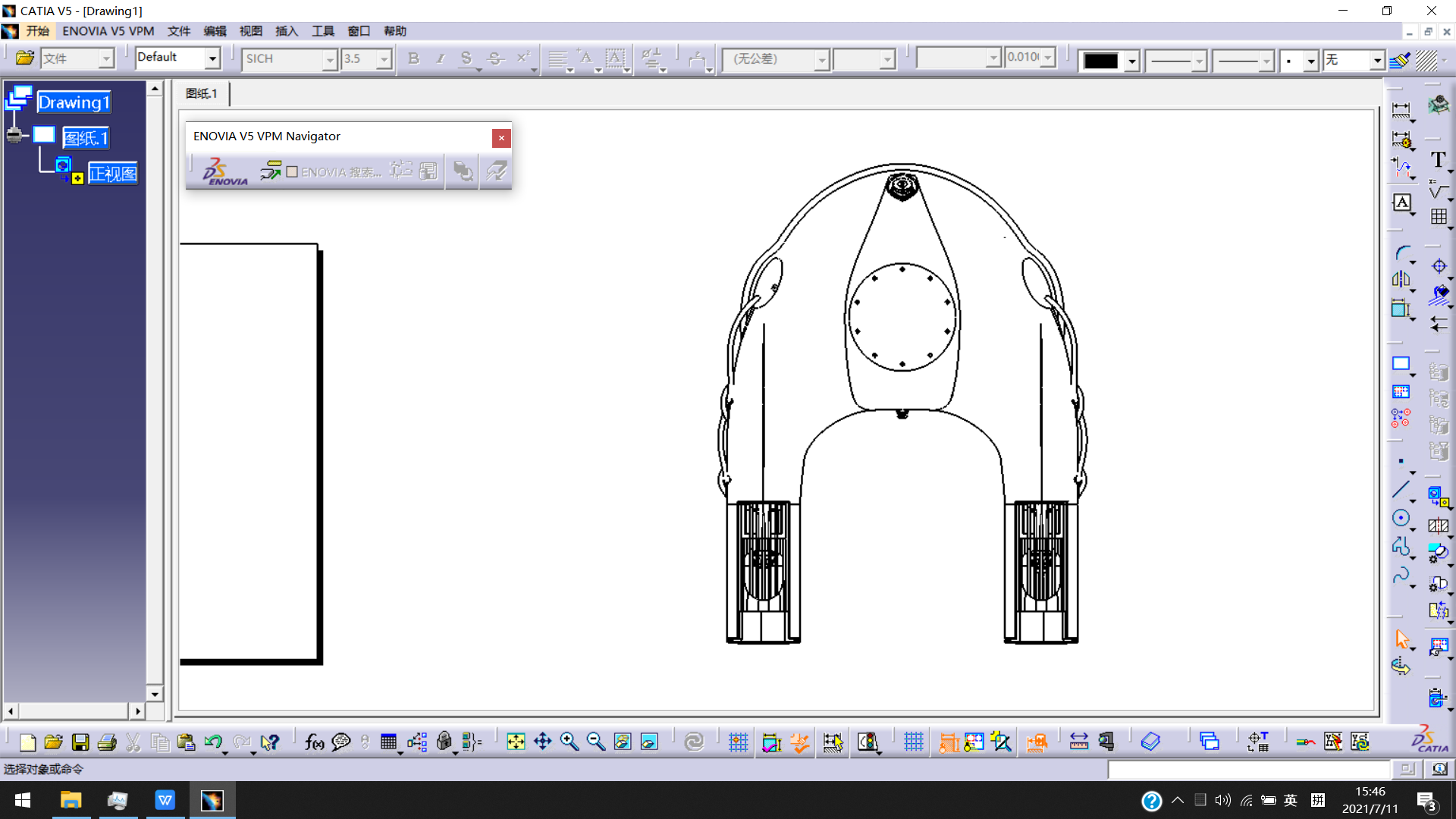
图1.4 救援机器人
1.2.1遥控操作救援机器人
遥控器开机。拔掉救援机器人中部位置的磁开关。遥控器和救援机器人开机不分先后顺序。
将救援机器人投入水中,施救过程中,可通过接收遥控器指令来完成包括前进、后退、左转、右转等功能,这些功能的组合使用,可将救援机器人操控至待救者所在位置。
通过遥控的方式将被救者拖回岸边或其他安全区域。或者,单击
A
键一键返航。其设定应在第
2
步进行,具体设置方式参见
1.1.1
节。
被救人员回到安全区域,回收救援机器人,插入磁开关,清洗、检查,或者,直接再次下水进行救援。
现将遥控器操作与救援机器人接受指令后的反应列出如下:
操作遥控器 | 救援机器人 |
前推摇杆,“前进”开始显示数值 | 沿船头指向航行 |
后拉摇杆,“后退”开始显示数值 | 沿船头指向的反方向航行 |
右前推摇杆,“前进”和“右转”开始显示数值 | 右转 |
左前推摇杆,“前进”和“左转”开始显示数值 | 左转 |
注:1.遥控器和救援机器人开机后,大约等待30秒,遥控器开机画面出现经度、纬度和方向数值。其中,等待时间受当地卫星信号强弱,卫星数量多少等影响。个别情况,等待时间可能超过60秒。
2.当设置了返航点且并未取消时,若仅关闭遥控器(或遥控器未关闭,但救援机器人所在位置超出遥控范围),一段时间后系统会检测到“失联”状态,救援机器人会启动推进系统。
1.3充电器
充电器分为遥控器充电器和救援机器人充电器,各1个。充电时,所有设备应关闭,严禁设备在开启状态下充电。
遥控器充电时,充电插头上的指示灯显示红色,充满后显示为绿色。
救援机器人充电时,应先将其船头上充电口的密封旋盖拧下,再连接充电器,充电器主体上的指示灯显示为红色,且发出“轰轰”声,充满后显示为绿色,“轰轰”声随即消失。
注:两个充电器在空载时,指示灯均显示绿色


图1.6救援机器人充电器图1.5遥控器充电器
2 日常保养
2.1 存储
若设备需要保存,请务必确保设备处于关闭状态,建议设备保存温度不高于
50
℃。若单次保存时长每超过一个月,请充电一次。
需要使用保存中的设备,必须开机通过遥控器检测电量,建议非满电量时充电为佳,如遇紧急事件也应保证至少有
50%
的电量。
建议存储地应干燥通风,
2.2 维护
每次使用完后应首先插入磁开关,然后再清洗船身,特别是推进系统,应仔细检查流道内是否缠有杂物,检查进水格栅的格条之间是否卡有砂石颗粒,非设备所属异物必须清除。
每次使用后,务必检查平衡阀,如遇堵塞,请用大量清水冲洗。
切勿用尖锐物磕碰、刮擦、击打救援机器人的任意部位,防止因这些行为产生可能的穿透船身的事件发生。船体穿透可导致船身漏水,尤其微小而不易察觉的泄露对设备及救援活动都将产生极大的潜在危害。
本救援机器人的推进系统含有高性能高强度螺旋桨,在砂石较多的水域也能发挥良好的救援效果,砂石对高速螺旋桨产生的轻微损伤不影响救援活动的继续开展。但严重损伤的螺旋桨必须更换,其更换方法见附录。
3 援助机器人使用注意事项
本产品是水面使用产品,请勿将设备用于水面以下
40cm
使用。
请勿将本设备在
5
℃~
60
℃环境下使用。
本救援机器人以磷酸铁锂电池作为动力。
-10
℃~
5
℃低温环境下电池动力输出会有所衰减,约为常温下标准容量的
75%
左右。低温天气使用请注意电量消耗速率,掌控好返航时机,严禁在
0
℃一下的低温充电。
建议在三级海况及以下使用本产品,高于三级海况可能会造成救援困难,较大的海浪会造成信号强度急剧衰减。
救援机器人在砂石较多的水域完成救援后,应重点检查螺旋桨磨损情况。若螺旋桨表面产生大量坑洞,或磨毛,或划痕较深,应立即停止使用,更换桨叶,其更换方法见附录。
请尽量避开水草和(或)水面垃圾投放点,以免进水口吸入过多杂质,或杂质堵住
进水口导致设备无法正常使用。
严禁将救援机器人的推进器在空气中持续运转超过
30
秒钟。
请勿在阳光下长时间曝晒。
4 技术参数
型号名称 | 产品指标 |
型号 | XXXX(自行填入) |
类型 | 双面推进 |
基础参数 | 密封等级 | IP67 |
长宽高 | 970mm×746mm×215mm |
空重 | ≤17kg |
抛投高度 | ≥20m |
排水量 | 50kg |
动力系统 | 推进器 | 4组涵道式推进器,正反两面皆可使用 |
动力电池 | 平台电压:35.2v 满电电压:40v 电池类型:磷酸铁锂 容 量:14.4AH 工作环境温度:0~50℃ 极端低温:-10℃~5℃电量约为70% -20℃~-10℃电量约为60% |
BMS | 过温、过充、过放、过流及短路保护 |
充电方案 | 常规充电≥2h(如有特殊需要可定制) |
工作环境温度 | 0℃~50℃ |
运行参数 | 负载速度 | ≥1.3 m/s (1人/100%油门) ≥1 m/s(1人/自主返航) |
空载速度 | 淡水最高航速≥ 5.2 m/s |
续航时间 | 经济续航≥40min(航速4m/s) 高速续航≥20min(100%油门) |
最高海况 | 3级 |
建议使用水深 | ≥450mm |
控制系统 | 显示屏 | 显示尺寸:1.3英寸 分辨率240×240显示比例:16:9 响应时间:10ms 工作电压:3.3V 材料:高清IPS LCD |
遥控器 | 通讯方式:双向433Hz,天线增益:2dbi 工作电压:7.2V电池:2200mAh 充电:micro USB 8.4V1A 遥控器电池工作环境:0℃~50℃ 遥控器工作环境:-10℃~55℃ 水面遥控半径:>800m(1km以上需定制) |
航行控制 | 手控:前进/后退,左、右差速转向 |
自动识别正反 | 内置6轴陀螺仪,可识别姿态信息,自动切换左右 |
注:如产品有技术优化或性能提升,以产品实际参数为准。
附录:
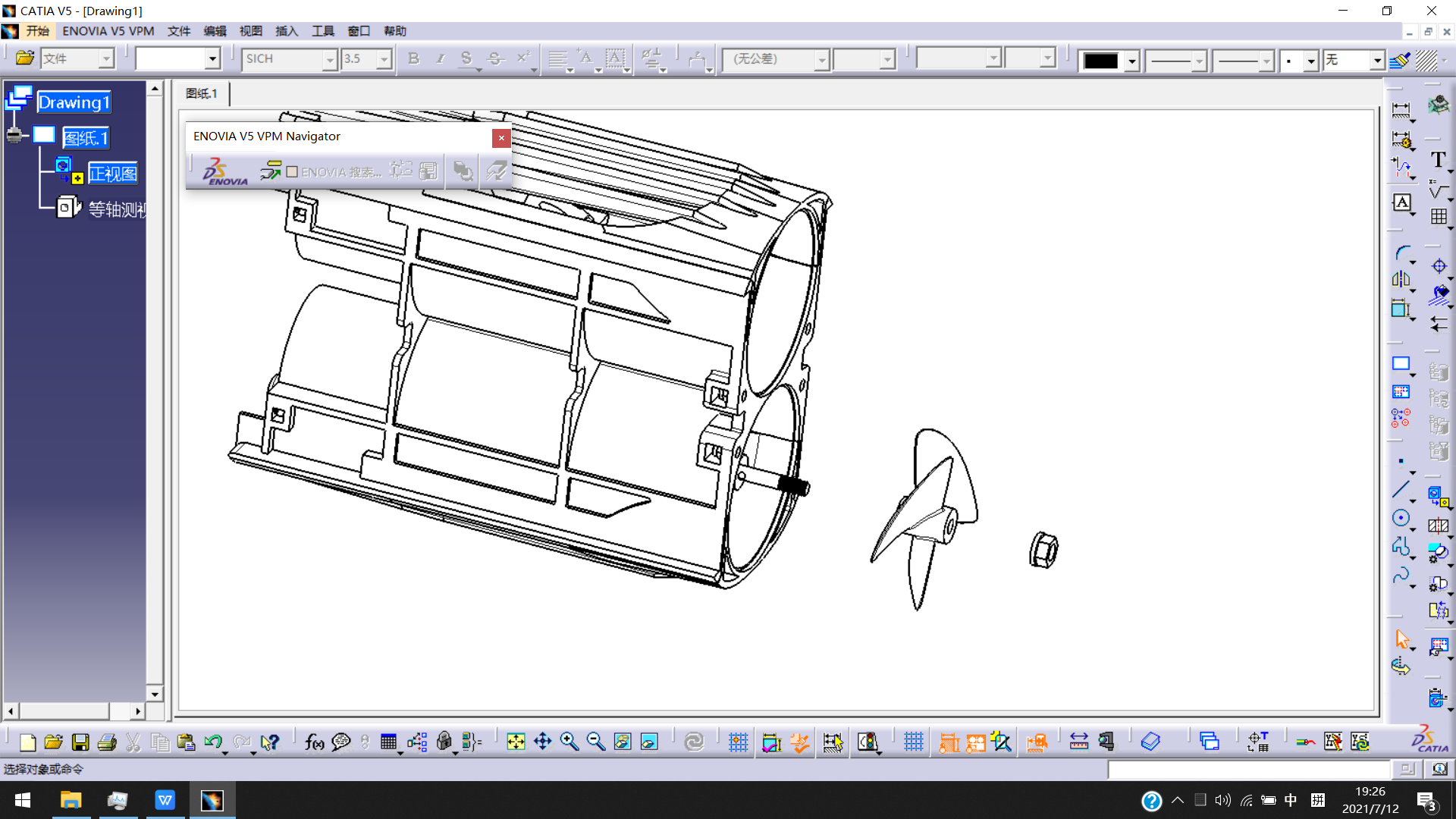
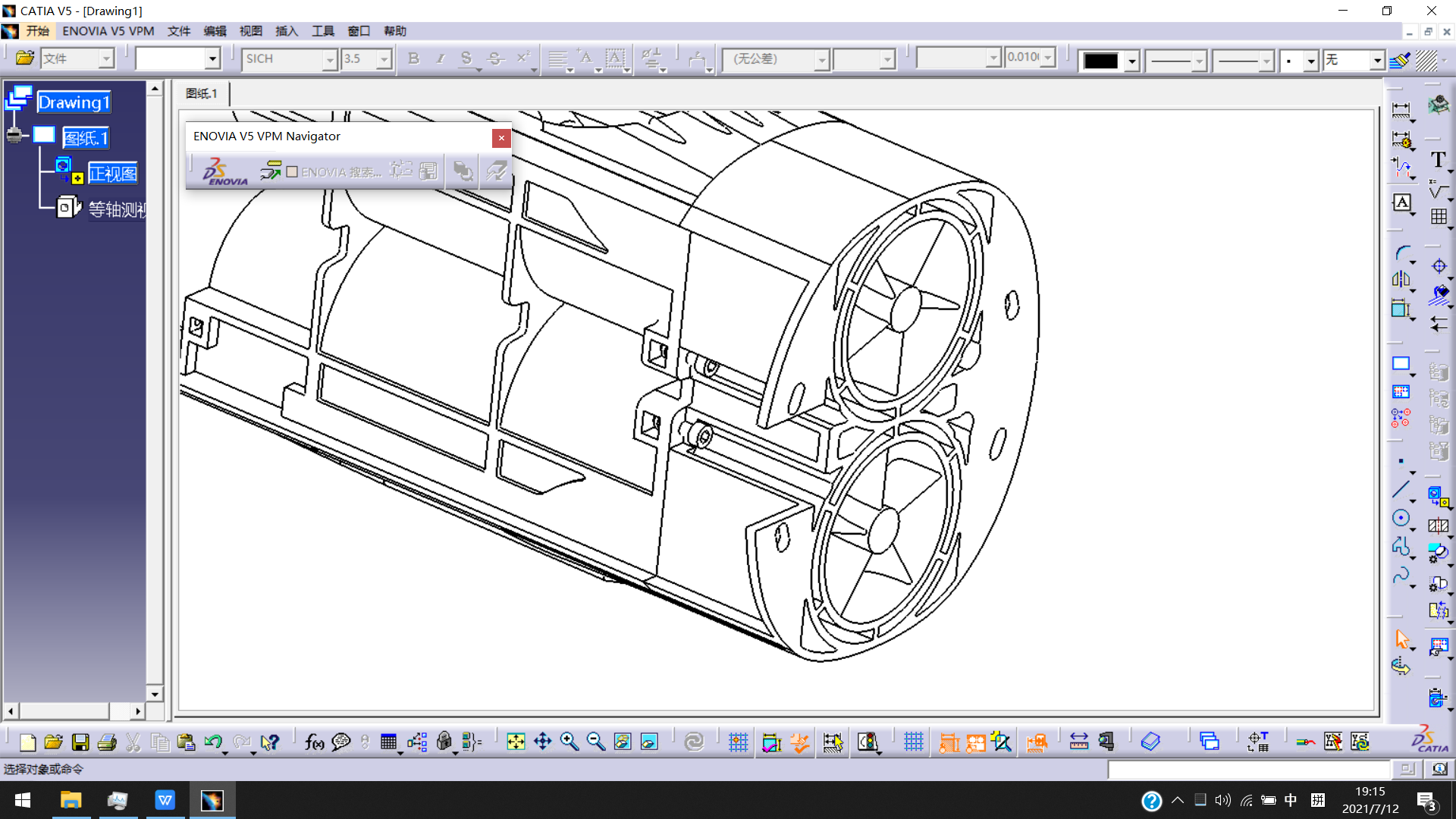
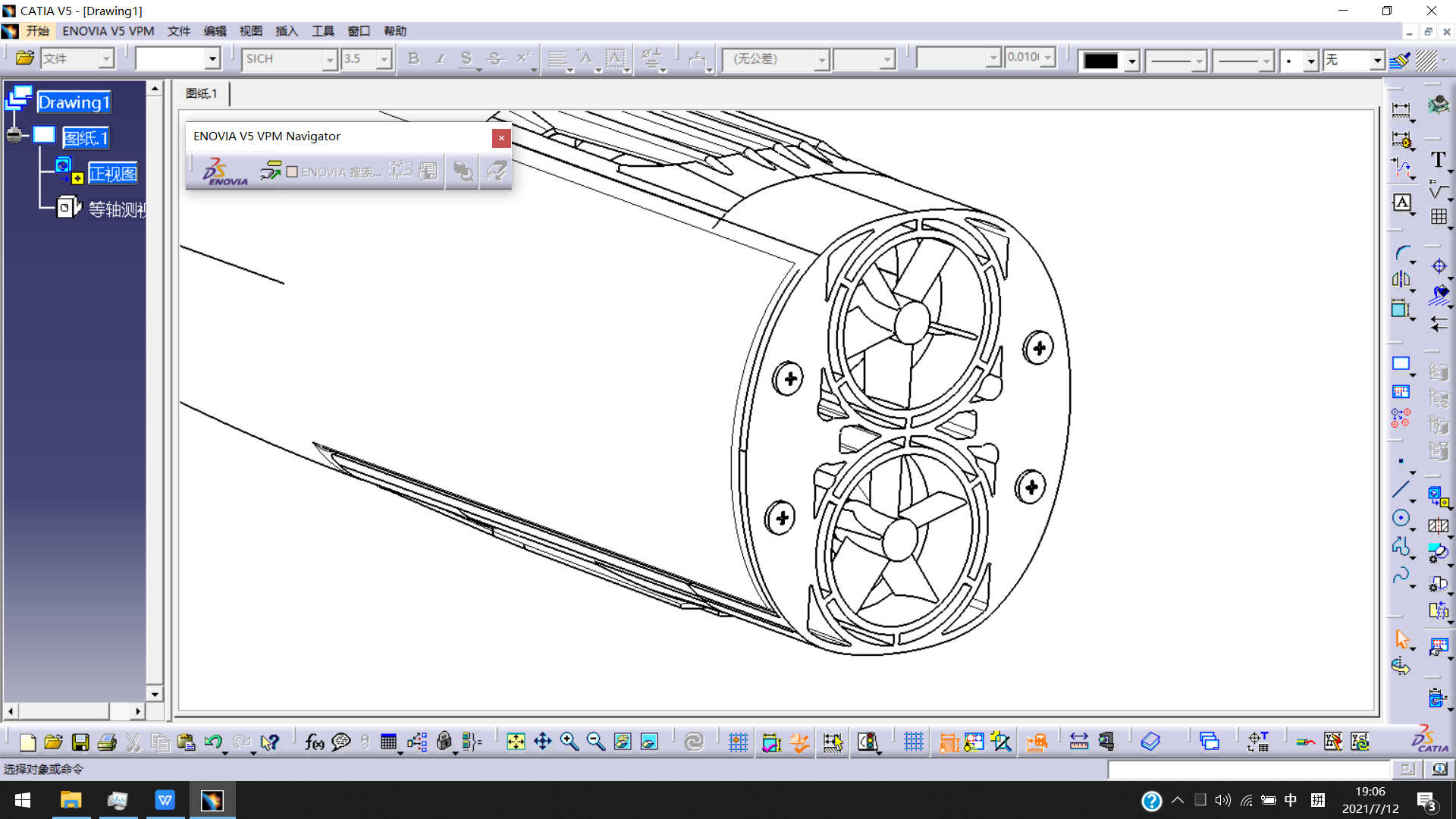
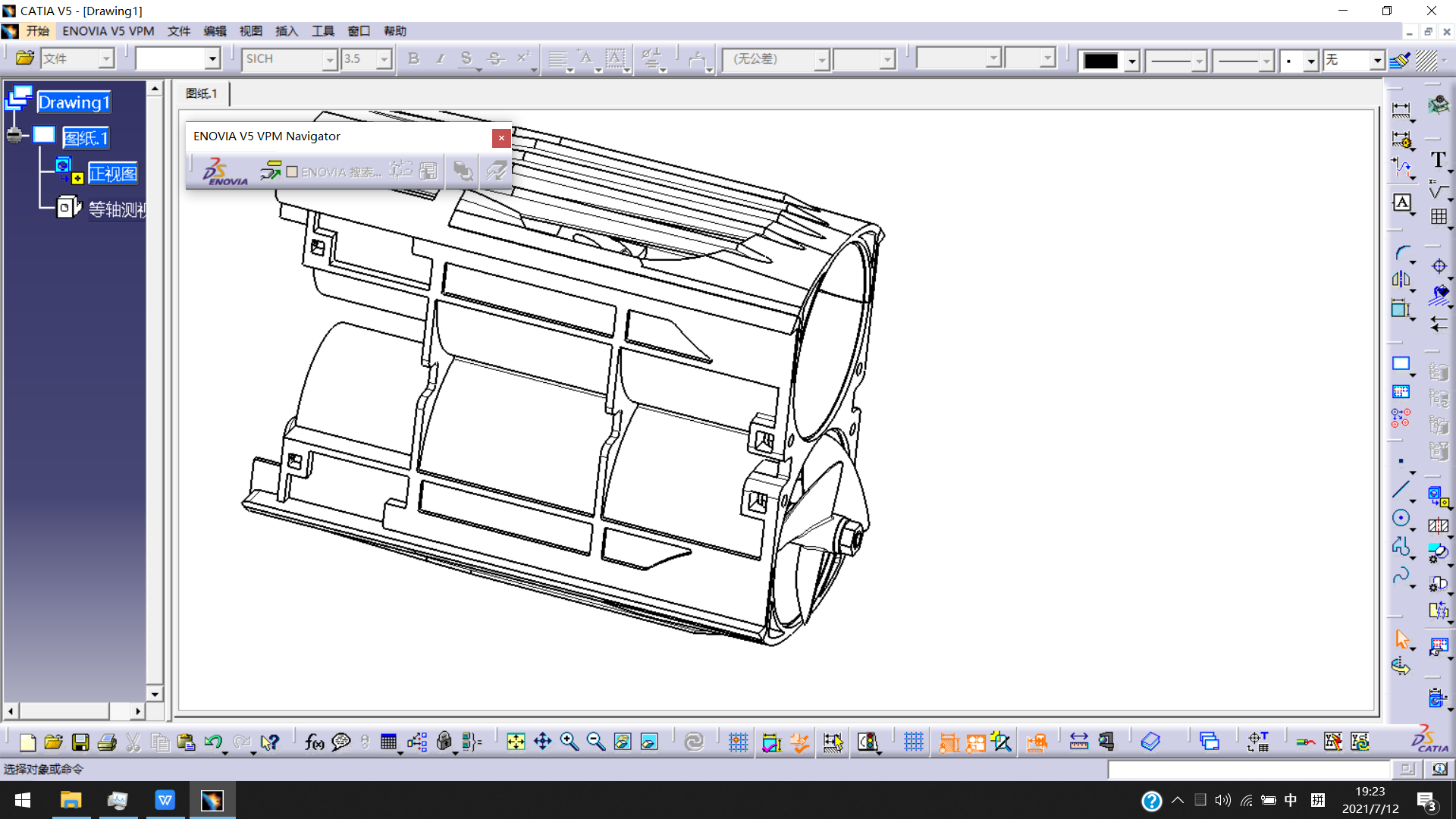 按照以上操作流程拆解螺旋桨,将损坏的螺旋桨取出,并依照流程反向操作,即可将完整螺旋桨装配至救援机器人推进系统中。注意,建议第一步拆解过的耐落螺丝更换新的耐落螺丝。第二步所含有的自锁螺母需更换新自锁螺母。
按照以上操作流程拆解螺旋桨,将损坏的螺旋桨取出,并依照流程反向操作,即可将完整螺旋桨装配至救援机器人推进系统中。注意,建议第一步拆解过的耐落螺丝更换新的耐落螺丝。第二步所含有的自锁螺母需更换新自锁螺母。
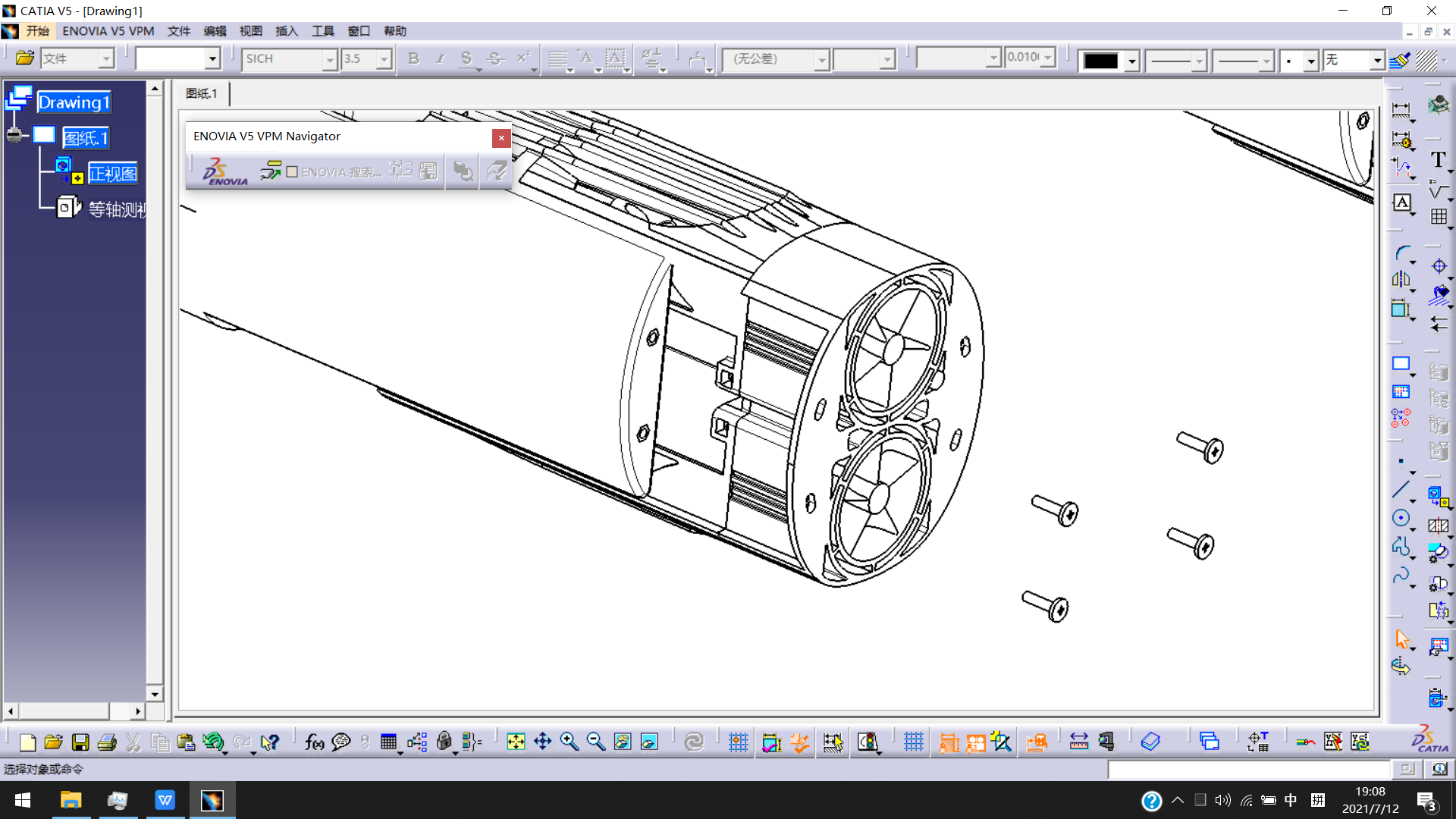 1.桨叶更换操作流程
1.桨叶更换操作流程





 关注微信公众号
关注微信公众号